Mesh Generation
 Overview
OverviewGoal⛳️: 인접 치아 메쉬로부터 크라운 메쉬 생성
- 예측된 대상 치아는 인접 치아와의 충돌없이 교합이 잘 되는 것이 중요하기에, 인접 치아의 위치를 모델이 이해하는 것이 포인트.
- 환자의 크라운 디자인을 위해서는 Mesh로 출력하는 것이 요구사항이기에 Point Cloud간의 연결성을 학습하는 것이 중요.
Motivation 📚
- 치과에서 크라운을 치공소에 보내어 크라운 디자인을 하는 시간적, 인적 리소스 축소 및 자동화.
- 다양한 메쉬를 생성함으로서 데이터 증강에 활용.
Data 🏦
데이터 구성
- 형식: 메쉬
- 데이터 수: 700개
- 인접 치아와 대상 치아 쌍
데이터 전처리
- 모든 치아의 데이터셋간의 위치를 맞추기 위해서 Rigid ICP 활용.
- Segmentation를 통해 치아 번호 분할.
- 분할된 치아에 대해 각 치아별 인접 치아와 대상 치아로 쌍을 구성.
Approach 💡
- PoinTr 모델을 활용하여 Point Completion 문제를 풀어, 인접 치아의 Global한 위치정보를 이해하도록 설계.
- 추가로, MLP를 뒷단에 붙여서 Mesh Surface를 생성하기 위해서 Point Cloud로부터 Normal Vector를 예측하도록 설계.
- Normal Vector를 학습하기 위해서, Differentiable Poissong Surface Reconstruction를 활용하여 Poisson 방정식를 풀도록 설계.
Workflow 👓

- 인접 치아 메쉬로부터 포인트 클라우트 추출.
- PoinTr 모델을 활용하여 대상 치아에 대한 Point Cloud 생성.
- Point Cloud로부터 MLP를 통과시켜 Point Cloud에 대한 offset 및 normal vector 예측.
- Point Cloud와 Normal Vector로부터 Differentiable Poisson Surface Reconstruction를 하여 Surface 정보를 Grid화 (Prediction grid).
- GT Mesh로부터 Point Cloud와 Normal vector를 샘플링하여 GT grid 생성.
- GT point cloud와 Predcition Point cloud사이의 Chamfer Distance Loss로 학습 및 GT grid와 Prediction grid간의 MSE Loss로 학습.
Differentiable Poisson Surface Reconstruction
포인트 클라우드와 법선 벡터로부터 implicit surface를 재구성하기위해 Poisson 방정식 푸는 접근 방식.
- 포인트 클라우드과 법선 벡터를 그리드 형태로 변환
- 레스터화된 데이터를 주파수 도메인으로 변환 (Fourier Transform)
- 법선 벡터의 발산 (divergence) 계산
- Laplacian 연산자 계산
- Poisson 방정식 해 계산(주파수 도메인의 해)
- Poisson 방정식의 해를 공간 도메인으로 변환
- 3D grid 형태의 implicit surface field 반환 (표면 내부에서 양수, 외부에서 음수, 표면에서 0으로 표현)
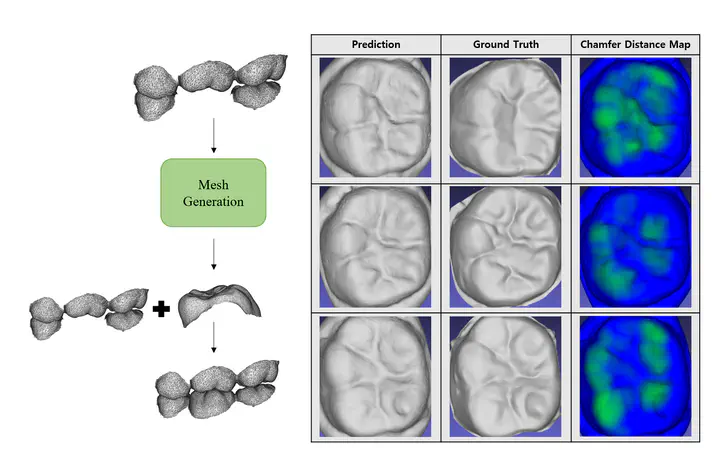
실험 결과 👨🔬

위 표는 모델이 생성한 치아 메쉬, 실제 치아 메쉬, 두 메쉬 간의 충돌 맵, 그리고 인접 치아들과 합쳐서 교합된 최종 결과를 보여줍니다.
실제 치아와의 치아 윗면을 비교해보았을 때, 치아 내의 굴곡과 교합이 상당히 잘 되어있는것으로 보입니다. 이는, PoinTr를 통해서 인접치아들과의 global localization 정보가 잘 반영되었고, 동시에 Differentiable Poisson Surface Reconstruction를 학습하여 Mesh의 local 특징인 표면이 잘 드러나보였습니다.